当人工智能可以帮助人类承担一些工作时,我们总是把双方的职责划分的很清楚。人类工作时,很少看到人工智能的主动参与,人工智能做事时,人类更是完全不插手。
这一点明显的体现就在于辅助驾驶上,人类驾驶时辅助驾驶顶多会通过灯光闪烁、方向盘震动来提示人类驾驶环境的变化,而不会主动去掌握主动权,影响汽车行动的方向和速度。在辅助驾驶自动泊车时,也会让人类双手离开方向盘。
其中的原因或许是人类的行为实在太千差万别,如果引入智能解决方案之中会加更多的计算量。人机合作的模式可以被分为三种类型。
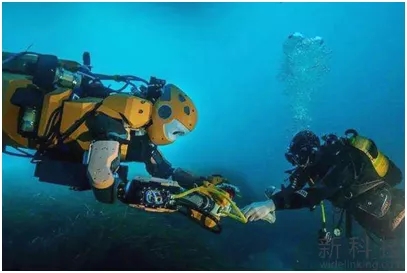
第一类合作模式是主从操纵。
在40年代,人类为了研究不宜人体接触的放射性物质,研发出了一种主从机械手对其进行远程操控。从机械手(或机器人)负责在不适宜人类前往的地方工作,通过传感系统收集和传达信息,而人类负责控制主机械手,将动作映射到从机械手上,就形成了完美的远程操作。